मृत गणना। विश्लेषणात्मक (लिखित) संकेतन के प्रकार
), जो आपको नौकायन में लागू नेविगेशन समस्याओं को सीधे हल करने की अनुमति देता है। लेखों की इस श्रृंखला में हम सीखेंगे कि जहाज के पथ की गणना कैसे करें, इसे समुद्री नेविगेशन चार्ट पर कैसे बनाएं, और फिर, हम नई अवधारणाओं से परिचित होंगे। खैर, हम इसके बिना कैसे कर सकते हैं (मैं अवधारणाओं के बारे में बात कर रहा हूं)। सुरक्षित नौकायन सुनिश्चित करने के लिए, कप्तान को स्पष्ट रूप से इसकी आवश्यकता है पर्यावरण में नेविगेट करें और अपनी नाव का स्थान स्पष्ट रूप से जानें। इस समस्या को हल करने के लिए, मानचित्र पर ग्राफिकल निर्माण किए जाते हैं, जो पथ की दिशा, कम्पास पाठ्यक्रमों के मूल्यों, बीयरिंगों और ली गई दूरियों के मूल्यों, ज्ञात वस्तुओं से सुरक्षित विचलन की गणना आदि को दर्शाते हैं। ऐसे निर्माणों के पूरे परिसर को नेविगेशन प्लॉट कहा जाता है।
संक्रमण शुरू होने से पहले, नाविक आगामी नौकायन के लिए नेविगेशन स्थितियों की पूरी श्रृंखला का अध्ययन करता है और अपेक्षित संक्रमण मार्ग और मानचित्र पर अतिरिक्त जानकारी अंकित करता है (मानचित्र उठाता है)। यह एक प्री-लेआउट है.
जैसे ही नौका निकलती है, नाविक इच्छित पथ से गति, पाठ्यक्रम, गति और बहाव के तत्वों को सावधानीपूर्वक रिकॉर्ड करना शुरू कर देता है। नौका पर नेविगेशनल स्टाफ का मतलब आमतौर पर कप्तान होता है। और कौन, वह रीपर भी है और पाइप पर भी... ठीक है, आप समझते हैं। हालाँकि कभी-कभी नाव पर सक्षम चालक दल के सदस्य (अंग नहीं) होते हैं जो इस कार्य को कर सकते हैं। हालाँकि, मैं विषयांतर करता हूँ, चलिए अपने... लेखांकन पर लौटते हैं। जहाज का स्थान और बाहरी कारकों (हवा का बहाव और धारा) के प्रभाव के तत्वों को मानचित्र पर निर्धारित और अंकित किया जाता है। यह एक प्रदर्शन गैसकेट है.
जब नौका की सटीक स्थिति नेविगेशनल या अन्य माध्यमों से निर्धारित नहीं होती है, तो इसे चार्ट पर उसके द्वारा अनुसरण किए जा रहे पाठ्यक्रम, बाहरी प्रभावों के मापदंडों (यदि निर्धारित हो) और गति का उपयोग करके प्लॉट किया जाता है। यह मृत गणना पद्धति है. जहाज के पथ की गणना पूरे मार्ग में लगातार की जाती है और यदि आवश्यक हो, तो उसके डेटा को सही किया जाता है, जब नाविक को एक अवलोकन स्थान मिलता है। मृत गणना प्रणाली स्वयं दो प्रकारों में आती है: ग्राफिक और विश्लेषणात्मक।
जहाज़ के पथ की विश्लेषणात्मक मृत गणना।
जहाज के पथ की विश्लेषणात्मक मृत गणना में सूत्रों और ज्ञात डेटा का उपयोग करके नौका के स्थान के निर्देशांक की गणना करना और फिर इसे मानचित्र पर प्लॉट करना शामिल है। छोटे पैमाने के मानचित्रों का उपयोग करते समय इस मृत गणना पद्धति का उपयोग मुख्य रूप से समुद्री नेविगेशन में किया जाता है। आधुनिक नौकायन में, इस जहाज की डेड रेकनिंग प्रणाली की अधिक मांग नहीं है; आजकल केवल पेशेवर नाविक ही इसमें शामिल होते हैं; जीपीएस उनकी मदद करता है। इसलिए, हम इस लेख में इस पर विचार नहीं करेंगे। लेकिन आइए जहाज के पथ की ग्राफिकल डेड रेकनिंग को अधिक विस्तार से देखें, खासकर जब से यह सहज है और एक नौसिखिए नाविक को भी इलेक्ट्रॉनिक्स (पाह-पाह-पाह) के बिना अंतरिक्ष में नेविगेट करने की अनुमति देता है।
जहाज़ के पथ की ग्राफ़िक डेड गणना।
किसी जहाज की ग्राफ़िकल डेड रेकनिंग की विधि में बहाव (यदि इसके पैरामीटर ज्ञात हैं) को ध्यान में रखते हुए, पाठ्यक्रम और अन्य डेटा को इंगित करने वाले मानचित्र पर ट्रैक लाइनें प्लॉट करना शामिल है। इन दो मृत गणना प्रणालियों के बीच अंतर का सार यह है कि एक जहाज की विश्लेषणात्मक मृत गणना में, ग्राफिकल निर्माणों के उपरोक्त परिसर को पूरा नहीं किया जाता है, और इसलिए शौकिया नाविकों की एक विस्तृत श्रृंखला के लिए इसमें महारत हासिल करना मुश्किल है। और कौन तंग नाविक की सीट पर बैठकर अंकगणितीय ऑपरेशन करना चाहता है? या क्या आप वही काम, वही गतिविधि करते हैं, लेकिन मानचित्र पर दिलचस्प रेखाएं और तीर खींचते हैं? मुख्य बात यह है कि ड्राइंग में बहुत अधिक न उलझें और मानचित्र को खराब न करें, जिसके बिना आप नौकायन में नहीं कर सकते।
किसी डेड रेकनिंग पद्धति के परिणामस्वरूप प्राप्त जहाज की स्थिति को डेड रेकनिंग कहा जाता है। आइए अब हम जहाज के पथ की मृत गणना की अवधारणा पर ध्यान दें। आरंभ करने के लिए, आइए मान लें कि नौका किसी बाहरी कारक (न तो बहाव और न ही धारा) से प्रभावित नहीं है। तब यह स्पष्ट है कि जहाज का पथ उसके पाठ्यक्रम की रेखा के साथ होगा और वह एक निश्चित अवधि में इस अवधि के मूल्य से उसकी गति के उत्पाद के बराबर दूरी तय करेगा।
मानचित्र पर दर्शाए गए नौका के मार्ग को हेडिंग एंगल कहा जाता है। नाव द्वारा तय की गई दूरी को नौका के मार्ग पर दिखाया गया है। यह दूरी सैद्धांतिक रूप से गति को समय से गुणा करके निर्धारित की जा सकती है, लेकिन व्यावहारिक रूप से इसे लॉग रीडिंग से लिया जाता है, क्योंकि लॉग बिल्कुल तय की गई दूरी को गिनता है, और यह पहले से ही गति की "गणना" करता है। जहाज के पथ की ग्राफ़िकल डेड गणना के शुरुआती बिंदु पर, समय और अंतराल गणना (T1 और OL1) को एक अंश के रूप में नोट किया जाता है, जिसका अंश समय (मिनट के लिए सटीक) है, और हर लैग गणना (0.1 समुद्री मील तक सटीक) है। यह डेटा मानचित्र पर प्रत्येक गणनीय स्थान के पास (यदि कोई अवलोकन है, तो देखे गए स्थान पर) प्लॉट किया जाता है। जहाज का मार्ग संदर्भ के बिंदु से प्लॉट किया गया है। इस बिंदु के सापेक्ष शेष गणनाएँ एवं निर्माण किये जाते हैं। गणनीय और देखे गए बिंदुओं को प्लॉट करने की आवृत्ति, नौकायन की स्थितियों और जटिलता के आधार पर, कप्तान के निर्णय से निर्धारित होती है।
एक जहाज की मृत गणना, ग्राफिक समस्याओं का समाधान।
अब जब हम डेड रेकनिंग और रूटिंग से थोड़ा परिचित हो गए हैं, तो हम ग्राफिक समस्याओं को सीधे हल करने के लिए आगे बढ़ सकते हैं। तो चलो शुरू हो जाओ। उपलब्ध निर्देशांक का उपयोग करते हुए, हम मानचित्र पर एक संख्यात्मक स्थान डालते हैं जहाँ से हम आगे का निर्माण करेंगे (यह एक अवलोकन किया गया स्थान हो सकता है, इसमें कोई बुनियादी अंतर नहीं है, केवल पदनाम भिन्न हैं)।
इस मामले में, हमारा प्रारंभिक डेटा इस प्रकार है: प्रारंभिक समय 00.00; आरंभिक अंतराल गणना 00.0; जहाज की गति 12 समुद्री मील है। यह स्पष्ट है कि व्यावहारिक नौकायन नौकायन में कोई भी इतनी गति से नहीं चलता है, लेकिन आइए "हमारे छोटे भाइयों" - मोटर नौकाओं के बारे में न भूलें। और ऐसी ही गणनाएँ उनके लिए भी प्रासंगिक हैं। इस तथ्य के बावजूद कि उनमें वास्तविक नौकायन के एक महत्वपूर्ण घटक - एक पाल, का अभाव है, समुद्र में वे नौकायन नौकाओं के समान कारकों के अधीन हैं।
 हम एक समानांतर रूलर और एक नेविगेटर के चांदे का उपयोग करके इस बिंदु से एक पाठ्यक्रम रेखा खींचते हैं। मान लीजिए प्रारंभिक शीर्ष 100° है; वर्तमान और बहाव अभी तक हमें ज्ञात नहीं है, और इसलिए इसे ध्यान में नहीं रखा गया है। और जहाज के कंपास से लिए गए कंपास हेडिंग मान को सही मान में बदलना न भूलें। नौकायन का एक घंटा बीत गया। समय होगा 01.00 बजे. लैग काउंट 12.0 है. आइए 01.00 बजे इस गणनीय बिंदु को मानचित्र पर चिह्नित करें। अगले, एक और घंटे में, हमें एक नए पाठ्यक्रम - 180° की ओर मुड़ना होगा। लेकिन अभी हम केवल 01.00 बजे बिंदु को चिह्नित करेंगे।
हम एक समानांतर रूलर और एक नेविगेटर के चांदे का उपयोग करके इस बिंदु से एक पाठ्यक्रम रेखा खींचते हैं। मान लीजिए प्रारंभिक शीर्ष 100° है; वर्तमान और बहाव अभी तक हमें ज्ञात नहीं है, और इसलिए इसे ध्यान में नहीं रखा गया है। और जहाज के कंपास से लिए गए कंपास हेडिंग मान को सही मान में बदलना न भूलें। नौकायन का एक घंटा बीत गया। समय होगा 01.00 बजे. लैग काउंट 12.0 है. आइए 01.00 बजे इस गणनीय बिंदु को मानचित्र पर चिह्नित करें। अगले, एक और घंटे में, हमें एक नए पाठ्यक्रम - 180° की ओर मुड़ना होगा। लेकिन अभी हम केवल 01.00 बजे बिंदु को चिह्नित करेंगे।
02.00 बजे का समय हो गया. और हम, जैसी कि हमें आवश्यकता थी, 180° की दिशा में मुड़ गए। समय में हमारे क्षण के अनुरूप बिंदु से, हम बस एक नया पाठ्यक्रम तैयार करेंगे। साथ ही, हम अभी भी केवल जहाज के पथ की ग्राफिकल डेड गणना कर रहे हैं। हमारा कोई अवलोकन नहीं है. अगले आधे घंटे में हम 225° के एक नए मार्ग की ओर मुड़ेंगे। और अब हमारा लैग काउंट 24.0 है। आइए गणना करें कि एक गणनीय बिंदु प्राप्त करने के लिए हमें पाठ्यक्रम रेखा पर कितनी दूरी तय करनी होगी।
आरओएल (लैग काउंट अंतर) = 24 - 12 = 12 - 12 समुद्री मील अलग रखें।
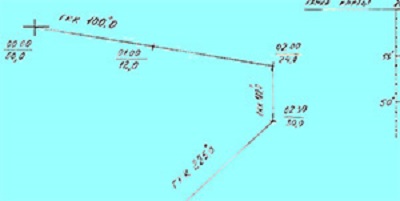 नई दर रेखा के ऊपर दर मान लिखना न भूलें। आधे घंटे में समय 02.30 बजेगा और लैग काउंट 30.0 होगा। जैसा कि ऊपर बताया गया है, हम स्थगित दूरी की फिर से गणना करते हैं:
नई दर रेखा के ऊपर दर मान लिखना न भूलें। आधे घंटे में समय 02.30 बजेगा और लैग काउंट 30.0 होगा। जैसा कि ऊपर बताया गया है, हम स्थगित दूरी की फिर से गणना करते हैं:
आरओएल = 30 - 24 = 6 - 6 समुद्री मील अलग रखें, हमारे गणना बिंदु को चिह्नित करें और एक नया पाठ्यक्रम तैयार करें।
अब, मान लीजिए कि हमारे पास अपनी नौका का स्थान सटीक रूप से निर्धारित करने का अवसर है, हम 15 मिनट में अवलोकन करेंगे। तदनुसार, समय बिंदु 02.45 होगा, और अंतराल गणना 33.0 होगी।
उफ़! लेकिन हमारा देखा गया बिंदु गणनीय बिंदु से मेल नहीं खाता। हमारी मृत गणना पद्धति में इसका क्या अर्थ है? लेकिन आप तुरंत निश्चित रूप से नहीं कह सकते। नौकायन में सब कुछ इतना सरल नहीं है।
हम केवल यह मान सकते हैं कि हमने गलती से नौका का स्थान निर्धारित कर लिया है या यह धारा या हवा के बहाव से प्रभावित है।
हम कई अवलोकनों के बाद ही विसंगति के कारण का अधिक सटीक आकलन कर सकते हैं। आइए गणनीय बिंदुओं के सापेक्ष उनकी स्थिति का विश्लेषण करें और देखें कि क्या हो रहा है। ऐसा करने के लिए, हम हर 15 मिनट में स्थान निर्धारण करना जारी रखेंगे। हमारे लेआउट के चित्र में, गणनीय बिंदु और उनके आगे देखे गए बिंदु दिखाई देंगे।
कृपया ध्यान दें कि गणनीय और प्रेक्षित बिंदुओं के बीच कोई लहरदार रेखा (विसंगति) नहीं है। इसका मतलब यह है कि हमने अवलोकन को ध्यान में नहीं रखा और प्लॉट किए गए कोर्स लाइन पर अपना स्थान मानते हुए, जहाज के पथ की ग्राफिकल डेड गणना करना जारी रखा। इसका मतलब यह नहीं है कि अवलोकन पर ही सवाल उठाया जाता है। हम अभी केवल सोच रहे हैं, और नौकायन की परिस्थितियाँ हमें अभी अवलोकन बिंदु को ध्यान में नहीं रखने की अनुमति देती हैं। नौकायन करते समय, उदाहरण के लिए, तंग परिस्थितियों में, हम लगातार जहाज का स्थान निर्धारित करते हैं और अवलोकनों द्वारा नेविगेट करते हैं। लेकिन उस पर बाद में।
 आइए अपने मानचित्र पर वापस लौटें। हम देखते हैं कि देखे गए बिंदु गणनीय बिंदुओं से दूर और दूर स्थित हैं। यह पहले से ही एक व्यवस्था है. हम कारणों की तलाश करते हैं और विश्लेषण शुरू करते हैं। पहली बात जिस पर हमें ध्यान देने की आवश्यकता है वह यह है कि हमारे बिंदु किस रेखा, सीधी या वक्र पर स्थित हैं। यदि किसी वक्र के साथ (किसी प्रकार की अतिशयोक्ति, उदाहरण के लिए - लेकिन, सबसे महत्वपूर्ण बात, सही वक्र के साथ), तो हमें यह विश्वास करने का पूरा अधिकार है कि हमारी मृत गणना विधि में नौका की स्थिति निर्धारित करने के लिए उपयोग किया जाने वाला मील का पत्थर गलत तरीके से बनाया गया है हमारे द्वारा पहचाने गए और हम, एक मील के पत्थर के नेविगेशन मापदंडों (बीयरिंग और दूरी, उदाहरण के लिए) के मूल्यों को लेते हुए, मानचित्र पर उन्हें दूसरे से प्लॉट करते हैं। इस मामले में, सभी उपलब्ध साधनों का उपयोग करके तुरंत लैंडमार्क की पहचान करना आवश्यक है। (जीपीएस नियंत्रण के बारे में मत भूलना)। यदि हमारे बिंदु एक सीधी रेखा में स्थित हैं, तो इसका मतलब है कि कुछ बाहरी (और, इसके अलावा, रैखिक) कारक नौका पर कार्य कर रहा है।
आइए अपने मानचित्र पर वापस लौटें। हम देखते हैं कि देखे गए बिंदु गणनीय बिंदुओं से दूर और दूर स्थित हैं। यह पहले से ही एक व्यवस्था है. हम कारणों की तलाश करते हैं और विश्लेषण शुरू करते हैं। पहली बात जिस पर हमें ध्यान देने की आवश्यकता है वह यह है कि हमारे बिंदु किस रेखा, सीधी या वक्र पर स्थित हैं। यदि किसी वक्र के साथ (किसी प्रकार की अतिशयोक्ति, उदाहरण के लिए - लेकिन, सबसे महत्वपूर्ण बात, सही वक्र के साथ), तो हमें यह विश्वास करने का पूरा अधिकार है कि हमारी मृत गणना विधि में नौका की स्थिति निर्धारित करने के लिए उपयोग किया जाने वाला मील का पत्थर गलत तरीके से बनाया गया है हमारे द्वारा पहचाने गए और हम, एक मील के पत्थर के नेविगेशन मापदंडों (बीयरिंग और दूरी, उदाहरण के लिए) के मूल्यों को लेते हुए, मानचित्र पर उन्हें दूसरे से प्लॉट करते हैं। इस मामले में, सभी उपलब्ध साधनों का उपयोग करके तुरंत लैंडमार्क की पहचान करना आवश्यक है। (जीपीएस नियंत्रण के बारे में मत भूलना)। यदि हमारे बिंदु एक सीधी रेखा में स्थित हैं, तो इसका मतलब है कि कुछ बाहरी (और, इसके अलावा, रैखिक) कारक नौका पर कार्य कर रहा है।
सीधे शब्दों में कहें तो, या तो हवा हमें बहा ले जाती है, या धारा, या दोनों। हम यह कैसे निर्धारित कर सकते हैं? सिद्धांततः, यह कठिन नहीं है। नौकायन में आप हमेशा कोई न कोई रास्ता खोज सकते हैं। यहां याद रखने योग्य दो महत्वपूर्ण नियम हैं:
अंतराल बहाव (छोटे बहाव कोणों पर) को ध्यान में रखता है।
लॉग वर्तमान को ध्यान में नहीं रखता.
यदि आप अधिक चतुर न बनें, तो यह इस तरह दिखता है। हम मानचित्र पर दो गणनीय बिंदुओं और समय में उनके अनुरूप अवलोकन बिंदुओं के बीच की दूरी को मापते हैं। यदि ये दूरियाँ समान हैं, तो हम बहाव से निपट रहे हैं। अंतराल की परवाह नहीं है, यह बहाव को ध्यान में रखता है। कि कोई बहाव नहीं है, कि वहाँ है, अंतराल दूरी अपेक्षाकृत सही ढंग से इंगित करती है (यदि यह अच्छे क्रम में है)।
हमारे मामले में बिल्कुल यही स्थिति है, यानी हम बह रहे हैं। लेकिन यदि गणनीय बिंदुओं के जोड़े और संबंधित प्रेक्षित बिंदुओं के बीच की दूरी अलग-अलग है, और इस अंतर का परिमाण स्थिर है, तो हम निस्संदेह वर्तमान की कार्रवाई का सामना कर रहे हैं।
लेकिन इस लेख और विचारशील पाठक के दिमाग पर बोझ न डालने के लिए, हम बाद में जहाज की मृत गणना पर बहाव और धारा के प्रभाव के बारे में बात करेंगे।
ए.ई. सेलेज़नेव की पुस्तक "बेसिक्स ऑफ़ नेविगेशन" की सामग्री के आधार पर
जहाज़ के पथ की ग्राफ़िक डेड गणना
ग्राफिकल नोटेशन का सार
नेविगेशन के संदर्भ में नेविगेशन की सुरक्षा बिंदुओं के बीच मार्ग के सही चयन और चुने हुए पथ का अनुसरण करने से सुनिश्चित होती है।
नेविगेशन में मार्ग चुनना सबसे महत्वपूर्ण कार्यों में से एक हैजिसका निर्णय संक्रमण के दौरान संपूर्ण स्थिति के गहन विश्लेषण पर आधारित है।
जहाज के चयनित मार्ग को मानचित्रों पर अंकित किया जाता है - प्रारंभिक आलेखन किया जाता है। जहाज के यात्रा पर निकलने से पहले कप्तान द्वारा प्रारंभिक बिछाने का काम किया जाता है। यह जहाज के लिए सुरक्षित और सबसे लाभदायक मार्ग चुनने पर काम का परिणाम है। नेविगेशन की नौवहन सुरक्षा सुनिश्चित करने के लिए, पाठ्यक्रम परिवर्तन के स्थानों को मानचित्र पर चिह्नित किया जाता है, जिसके लिए मोड़ बिंदु चुने जाते हैं ताकि इन बिंदुओं पर जहाज के आगमन के क्षण जल्दी से निर्धारित किए जा सकें, उदाहरण के लिए, बीम पर आगमन के क्षण, लक्ष्य पर, आदि
वे उस दूरी की रूपरेखा तैयार करते हैं जिस दूरी से केप, लाइटहाउस और अन्य स्थल गुजरेंगे।
झुकाव यात्रा के वर्ष को दिया गया है और इसका मूल्य जहाज की पूरी यात्रा के दौरान पेंसिल में लिखा गया है।
वास्तविक पाठ्यक्रम मान ट्रैक लाइनों के ऊपर लिखे गए हैं।
प्रत्येक मार्ग के साथ मीलों में दूरी मानचित्र से ली जाती है और पूरे मार्ग के मीलों की संख्या की गणना की जाती है।
मार्ग पर, पुल की ऊंचाई के लिए बीकन और रोशनी की दृश्यता सीमा की सीमाएं चिह्नित की जाती हैं, और व्यक्तिगत क्षेत्रों में जहाज की स्थिति निर्धारित करने के लिए सबसे उपयुक्त तरीकों की रूपरेखा तैयार की जाती है। समय को परिचालन समय से रखा जाता है, जहाज के प्रस्थान समय को 00 घंटे 00 मिनट पर गिना जाता है।
प्रारंभिक बिछाने से पहले, कार्ड उठा लिया जाता है (§ 45 देखें)।
प्रारंभिक बिछाने की प्रक्रिया के दौरान की गई गणना अनुमानित है और नेविगेशन के दौरान इसे समायोजित किया जाना चाहिए।
प्रारंभिक रूटिंग, एक नियम के रूप में, रूट मानचित्रों पर की जाती है।
दूसरा सबसे महत्वपूर्ण कार्य- चुने हुए पथ पर जहाज की आवाजाही सुनिश्चित करना, इस उद्देश्य के लिए वे लगातार जहाज की गति को रिकॉर्ड करते हैं - जहाज के पथ की मृत गणना।
डेड रेकनिंग के मुख्य तत्व हैं हेडिंग (कम्पास द्वारा) और तय की गई दूरी (लॉग द्वारा)।
जहाज की चित्रमय मृत गणना आचरण में व्यक्त की जाती है कार्यकारिणीनेविगेशन पैड. इसकी शुरुआत घाट से जहाज के प्रस्थान (एंकरिंग) के साथ मेल खाती है; बंदरगाह छोड़ते समय, नाविक बंदरगाह या रोडस्टेड के ज्ञान और नेविगेशन प्रणाली के सही उपयोग के आधार पर आसपास के वातावरण में दृश्य अभिविन्यास पर विशेष ध्यान देता है, सहायता करता है नेविगेशन और प्राकृतिक स्थलों के लिए।
एक बार साफ पानी में, जहाज की स्थिति सटीक रूप से निर्धारित की जाती है और प्राप्त बिंदु से बिछाने का काम किया जाता है।
इस बिंदु पर पहुंचने से पहले, लैग को चालू करें, शुरुआती बिंदु के पास अंश में अंश के रूप में समय लिखा होता है, और हर में लैग गिनती लिखी होती है।
प्रारंभिक बिंदु से एक आईआर लाइन बिछाई जाती है, जिस पर हर घंटे या चार घंटे में गणनीय बिंदु अंकित होते हैं। बाहरी स्थलों के नेविगेशन मापदंडों को मापे बिना प्राप्त स्थान।
ट्रैक लाइन पर एक छोटी अनुप्रस्थ रेखा के साथ गणनीय बिंदुओं को चिह्नित किया जाता है, और ट्रैक लाइन की मोटाई लगभग मेरिडियन और समानांतर की मोटाई के बराबर होनी चाहिए।
सभी बिछाने और गणनाएं एक नरम, बारीक धार वाली पेंसिल से की जाती हैं।
अवलोकनों के अनुसार जहाज का स्थान, अर्थात्। नेविगेशन मापदंडों को मापने के परिणामों के आधार पर, पाठ्यक्रम बदलते समय बाहरी स्थलों को जितनी बार संभव हो सके और यदि संभव हो तो आवश्यक रूप से प्लॉट किया जाता है।
प्रेक्षित स्थानों को RShS-89 के अनुसार प्रतीकों द्वारा दर्शाया गया है।
प्रेक्षित बिंदु और गणनीय बिंदु के बीच की विसंगति को विसंगति कहा जाता है, जिसे अक्षर "सी" द्वारा दर्शाया जाता है। इसकी दिशा और परिमाण जहाज के लॉग में दर्ज किया गया है (С=225º -1.5')
विसंगति की दिशा की गणना परिकलित बिंदु से प्रेक्षित बिंदु तक की जाती है।
बिछाने की प्रक्रिया तब समाप्त होती है जब जहाज बंदरगाह के पानी में प्रवेश करता है या उस बिंदु पर जहां जहाज के लंगर डाले जाने पर युद्धाभ्यास शुरू होता है।
इस प्रकार, रूटिंग एक जहाज के पथ को चुनने, उसकी गति को ध्यान में रखने और जहाज की स्थिति निर्धारित करने से जुड़े माप, गणना और ग्राफिकल निर्माण का एक सेट है।
ग्राफिकल नोटेशन और समाधान बनाए रखना
बहाव और प्रवाह के अभाव में समस्याएँ
जहाज के बहाव और बहाव की अनुपस्थिति विभिन्न समस्याओं को हल करते समय मानचित्र पर ग्राफिकल निर्माण और गणना दोनों को सरल बनाती है।
पहले तो, जहाज का पथ उसके DP की दिशा से मेल खाता है, अर्थात। आईआर लाइन के साथ.
दूसरे, पानी के सापेक्ष जहाज द्वारा तय की गई दूरी अर्थात लॉग रीडिंग के अनुसार, इसकी त्रुटि को ठीक करते हुए, यह उसी समय जमीन के सापेक्ष तय की गई वास्तविक दूरी (एस एल = एस आई) है।
सीधी समस्या का समाधान
(पाठ्यक्रम सुधार कार्य)
|
एमके के अनुसार दिए गए स्टीयरिंग सीसी के साथ |
नागरिक संहिता के लिए भी यही बात है |
||||||||
उलटी समस्या का समाधान
(पाठ्यक्रम अनुवाद के लिए कार्य)
विशिष्ट समस्याओं का समाधान
मैं।मानचित्र पर जहाज का स्थान अंकित करना।
दिया गया:टी 1, ओएल 1, टी 2, ओएल 2। खोजो: एस एल.
अंकन का उद्देश्य और प्रकार. मुख्य लक्ष्य,
मानचित्र पर हल करने योग्य
रेकनिंग प्रारंभिक बिंदु के रूप में लिए गए बिंदु से उसकी गति के आधार पर किसी भी क्षण जहाज की स्थिति प्राप्त करने की प्रक्रिया है।
डेड रेकनिंग नेविगेशनल (वाद्य) नेविगेशन का आधार बनती है। कैप्टन के सहायक पूरी यात्रा के दौरान उसके नियंत्रण में निगरानी के आधार पर गिनती करते हैं। वे बंदरगाह छोड़ने या लंगर उठाने के तुरंत बाद गिनती शुरू करते हैं, और गंतव्य बंदरगाह के रोडस्टेड पर पहुंचने के साथ समाप्त होते हैं। मतगणना की शुरुआत और समाप्ति का स्थान और समय कैप्टन द्वारा निर्धारित किया जाता है। दी गई शर्तों के तहत प्राप्त की जा सकने वाली जहाज की सबसे सटीक स्थिति को शुरुआती बिंदु के रूप में लिया जाता है। यदि यात्रा के दौरान एक बड़ी मृत गणना त्रुटि का पता चलता है, तो इसे एक नए प्रारंभिक बिंदु पर स्थानांतरित करना और ध्यान में रखे गए आंदोलन के तत्वों को बदलना भी कप्तान के ज्ञान से किया जाता है।
डेड रेकनिंग द्वारा प्राप्त मानचित्र पर जहाज की स्थिति और उसके निर्देशांक j c, l c को गणना योग्य कहा जाता है। ऐसे बिंदु के पास, एक क्षैतिज रेखा खींची जाती है, जिसके ऊपर जहाज का समय (घंटे, मिनट) लिखा होता है, और नीचे - लॉग गणना (सैकड़ों, दसवें को इंगित किए बिना मील)। यदि लॉग काम नहीं करता है, तो एक डैश है नीचे रखा गया है.
अंकन के सार को ध्यान में रखते हुए, इसे तीन प्रकारों में विभाजित किया गया है: ग्राफिक, विश्लेषणात्मक और स्वचालित। इसके बावजूद, यदि आवश्यक हो, तो वे यह निर्धारित करते हैं कि किन शर्तों को ध्यान में रखा जाएगा - बहाव, प्रवाह, परिसंचरण।
जहाज के पाठ्यक्रम और गति में किसी भी बदलाव के दौरान, नौकायन स्थितियों में अन्य परिवर्तनों के साथ-साथ जहाज के लॉग में दर्ज की गई सभी घटनाओं के दौरान, गणनीय बिंदुओं को मानचित्र पर प्लॉट किया जाना चाहिए। यदि पाठ्यक्रम और गति स्थिर है, तो तट के साथ नौकायन करते समय, हर घंटे मानचित्र पर गणनीय बिंदु अंकित किए जाते हैं, और खुले समुद्र (समुद्र में) में नौकायन करते समय - घड़ियाँ बदलते समय चार घंटे के बाद।
आमतौर पर गणनीय स्थान जहाज के समय के वर्तमान क्षण में पाया जाता है। कभी-कभी भविष्य में किसी निश्चित समय पर अनुमानित गणनीय स्थान को ढूंढना आवश्यक होता है या इसके विपरीत, अतीत में किसी घटना के समय गणनीय स्थान को पुनर्स्थापित करना आवश्यक होता है। समान और किसी अन्य संख्या की समस्याओं को ग्राफ़िक या विश्लेषणात्मक रूप से हल किया जा सकता है।
विभिन्न नेविगेशन समस्याओं को ग्राफिक रूप से हल करने के लिए, वे एक मापने वाले कंपास, एक समानांतर शासक और एक नेविगेशन प्रोट्रैक्टर का उपयोग करते हैं।
मापने वाले कंपास का उपयोग मानचित्र पर दूरियों को मापने और अंकित करने के लिए किया जाता है। दूरियाँ समुद्री मील में मापी जाती हैं। पैमाना उस स्थान के विपरीत मानचित्र का पार्श्व (ऊर्ध्वाधर) फ्रेम है जहां माप किया जाता है। इस पैमाने का एक मिनट एक समुद्री मील के बराबर होता है।
किसी मानचित्र पर दी गई दिशा के समानांतर सीधी रेखाएँ खींचने के लिए समानांतर रूलर का उपयोग किया जाता है। इसमें दो रूलर होते हैं जो काज पर धातु की छड़ों से जुड़े होते हैं। यह कनेक्शन आपको दी गई दिशा को बनाए रखते हुए रूलर को स्थानांतरित करने की अनुमति देता है, जो कि कोर्स और बेयरिंग लाइनें बिछाते समय आवश्यक है। एक साधारण ड्राइंग कम्पास का भी उपयोग किया जाता है, जिसकी सहायता से मानचित्र पर चाप खींचे जाते हैं - जब तटीय वस्तुओं की दूरी के आधार पर स्थान का निर्धारण किया जाता है।
मानचित्र पर कोणों को आलेखित करने और मापने के लिए एक नेविगेशन प्रोट्रैक्टर की आवश्यकता होती है। यह एक अंशांकित अर्धवृत्त है जिसका एक रूलर बिंदु "0" पर केन्द्रित है। इसके बाहरी चाप पर डिग्री विभाजन हैं। विभाजन पट्टियाँ, पाँच डिग्री के गुणज, लम्बी होती हैं। दसियों डिग्री को चिह्नित करने वाले स्ट्रोक के विपरीत दो संख्याएँ हैं जिनका अंतर 180° है। ऊपरी संख्याएँ कम्पास कार्ड के उत्तरी आधे भाग की दिशाओं के अनुरूप हैं, और निचली संख्याएँ - दक्षिणी आधे भाग की दिशाओं के अनुरूप हैं। मानचित्र पर मेरिडियन के एक निश्चित कोण पर एक रेखा खींचने के लिए, मानचित्र पर एक चाँदा लगाना आवश्यक है ताकि केंद्रीय स्ट्रोक "0" और चाप पर रेखा, जो दी गई डिग्री की संख्या को इंगित करती है, मेल खाती है। मेरिडियन रेखा के साथ. फिर रूलर के ऊपरी किनारे पर उचित दिशा में खींची गई एक रेखा वांछित दिशा देगी।
बिछाने के दौरान, निम्नलिखित मुख्य कार्यों को हल करना आवश्यक है:
1) मानचित्र से किसी दिए गए बिंदु का अक्षांश और देशांतर हटा दें;
2) मानचित्र पर एक बिंदु अंकित करने के लिए दिए गए अक्षांश और देशांतर का उपयोग करें;
3) मानचित्र पर किसी दिए गए बिंदु से एक मार्ग या दिशा का रेखांकन करें;
4) किसी दिए गए बिंदु से किसी निश्चित दिशा में एक निश्चित संख्या अलग रखें
5) मानचित्र पर अंकित मार्ग या दिशा की दिशा निर्धारित करें;
6) समुद्री मानचित्र पर दो बिंदुओं के बीच की दूरी मापें;
7) मानचित्र पर आरंभिक बिंदु से एक निश्चित दूरी पर एक मार्ग अंकित करें
यह आइटम;
8) एक बिंदु को एक मानचित्र से दूसरे मानचित्र पर ले जाएं।
1. मानचित्र से किसी दिए गए बिंदु का अक्षांश और देशांतर लें। कम्पास का उपयोग करके इस समस्या का समाधान किया जाता है। कम्पास की एक सुई को एक निश्चित बिंदु पर रखकर, उसे अलग कर दें ताकि दूसरी सुई निकटतम समानांतर पर पड़े। कम्पास से वृत्त का एक भाग खींचकर यह सुनिश्चित करें कि इसकी सुई निकटतम समांतर को केवल एक बिंदु पर छूती है। फिर, कम्पास के समाधान को बदले बिना, इसे मानचित्र फ्रेम के किनारे पर स्थानांतरित करें और, इसकी एक सुई को उसी निकटतम समानांतर में संलग्न करें जो सर्कल के हिस्से को छूता है, और दूसरे को फ्रेम के साथ इस बिंदु की ओर निर्देशित करता है, अर्थात। इस समानांतर से N या S तक, इस बिंदु के अनुरूप अक्षांश लें।
देशांतर मापने के लिए, कम्पास की एक सुई को किसी दिए गए बिंदु पर रखें और, इसे निकटतम मेरिडियन तक विस्तारित करते हुए, मेरिडियन के स्पर्शरेखा वाले वृत्त का वर्णन करने के लिए दूसरी सुई का उपयोग करें। कम्पास के समाधान को बदले बिना, इसे मानचित्र फ्रेम के निचले या ऊपरी भाग में स्थानांतरित करें और, इसकी एक सुई को मेरिडियन पर रखकर, जिस पर स्पर्शरेखा वृत्त का भाग खींचा गया था, दूसरी सुई को इस फ्रेम पर दिए गए दिशा में रखें। बिंदु और देशांतर ले लो.
यदि स्केल अनुमति देता है, तो अक्षांश और देशांतर 0¢.1 की सटीकता के साथ दर्ज किए जाते हैं।
2. दिए गए अक्षांश और देशांतर का उपयोग करके मानचित्र पर एक बिंदु अंकित करें। मानचित्र पर एक बिंदु को आलेखित करने के लिए, पार्श्व फ़्रेम पर एक विभाजन देखें जो किसी दिए गए अक्षांश की डिग्री और मिनटों की संख्या से मेल खाता है, और, इस विभाजन के निकटतम समानांतर में एक समानांतर शासक को लागू करते हुए, शासक को इस प्रकार घुमाएँ कि एक इसके कटौतियाँ दिए गए अक्षांश के विभाजन पर पड़ती हैं; फिर, आयत में जहां बिंदु लगभग स्थित होना चाहिए, रूलर के कट के साथ दो मेरिडियन के बीच एक रेखा खींची जाती है। मानचित्र फ़्रेम के निचले या ऊपरी हिस्से पर एक विभाजन पाया गया जो किसी स्थान के दिए गए देशांतर की डिग्री और मिनटों की संख्या से मेल खाता है, और इस विभाजन से निकटतम मेरिडियन तक एक खंड लेने के लिए एक कंपास का उपयोग करके, इस खंड को रखें उसी मध्याह्न रेखा से एक पेंसिल से खींची गई रेखा पर और वह बिंदु प्राप्त करें जिसे आप ढूंढ रहे हैं।
एक ही कार्य को केवल एक रूलर का उपयोग करके पूरा किया जा सकता है। ऐसा करने के लिए, साइड फ्रेम पर दिए गए अक्षांश को ढूंढकर और रूलर को निकटतम समानांतर में लगाकर, इसके कट को दिए गए अक्षांश पर लाएं, जिसके साथ आयत में जहां वांछित बिंदु स्थित है, वहां एक पेंसिल के साथ एक छोटी रेखा खींची जाती है। फिर, मानचित्र फ़्रेम के निचले या ऊपरी हिस्से पर दिए गए देशांतर के अनुरूप एक विभाजन पाए जाने पर, शासक के एक कट को निकटतम मध्याह्न रेखा पर लागू करें और, शासक को घुमाते हुए, उसके एक कट को दिए गए देशांतर के विभाजन पर लाएं , जिसके साथ एक छोटी रेखा भी खींची गई है। दो खींची गई रेखाओं का प्रतिच्छेदन वांछित बिंदु देता है।
3. मानचित्र पर इस बिंदु से, एक मार्ग या दिशा अंकित करें। इस समस्या को हल करने के लिए एक चाँदे और रूलर का उपयोग करें। इससे पहले कि आप समस्या को हल करना शुरू करें, आपको किसी दिए गए पाठ्यक्रम या असर की दिशा की कल्पना करने की आवश्यकता है, अर्थात। यह दिशा क्षितिज के किस तिमाही में स्थित होगी। मानचित्र पर एक जुड़े हुए समानांतर रूलर के साथ एक चांदा रखें ताकि रूलर का निचला भाग लगभग मेरिडियन के साथ दी गई दिशा में हो, केंद्रीय स्ट्रोक को मेरिडियन से दूर दाएं या बाएं ओर ले जाए बिना चांदा को तब तक घुमाएं जब तक कि दिए गए पाठ्यक्रम के अनुरूप चांदा का विभाजन मेरिडियन के साथ मेल खाता है।
एक मैच हासिल करने के बाद, प्रोट्रैक्टर को हटा दें और, समानांतर शासक के कट को इस बिंदु पर लाते हुए, एक कोर्स लाइन खींचें, इसे शासक के कट के साथ एक पेंसिल के साथ खींचें। यदि प्रोट्रैक्टर रूलर लगभग शून्य या 180° के करीब पाठ्यक्रम पर मेरिडियन की दिशा में स्थित है, तो प्रोट्रैक्टर को समानांतर में लागू करना और इसे दिए गए पाठ्यक्रम ±90° के संदर्भ में सेट करना बेहतर है।
प्रोट्रैक्टर डिवीजनों पर शिलालेख इस तरह से बनाए गए हैं कि पाठ्यक्रम या असर की दिशा को इंगित किया जा सके; इसलिए एन या ऊपर की ओर निर्देशित पाठ्यक्रमों के लिए, प्रोट्रैक्टर पर संबंधित शिलालेख शीर्ष पर हैं, जबकि एस या नीचे की ओर निर्देशित पाठ्यक्रमों या बीयरिंगों के लिए, शिलालेख नीचे हैं।
4. किसी दिए गए बिंदु से किसी निश्चित दिशा में मील की एक निश्चित संख्या अलग रखें। इस समस्या को हल करते समय, यह याद रखना आवश्यक है कि मर्केटर मानचित्र पर एक समुद्री मील को अक्षांश के आधार पर अलग-अलग लंबाई के खंडों के रूप में दर्शाया गया है।
निर्दिष्ट दूरी किसी दिए गए बिंदु के अक्षांश के लगभग अनुरूप अक्षांश से मानचित्र फ्रेम के किनारे पर एक कंपास का उपयोग करके ली जाती है। यदि पाठ्यक्रम N की ओर निर्देशित है, तो यह दूरी इस बिंदु से N तक ले ली जाती है, या यदि पाठ्यक्रम S की ओर निर्देशित है, तो S तक ले जाया जाता है, और प्लॉट किए गए पाठ्यक्रम या बियरिंग की रेखा पर इस बिंदु से हटा दिया जाता है। यदि किसी दी गई दूरी का मान एक कम्पास समाधान से नहीं मापा जा सकता है, तो इस दूरी को भागों में विभाजित किया जाता है, और प्रत्येक भाग को इस भाग के अनुरूप अक्षांश पर लिया जाता है।
5. मानचित्र पर दिखाए गए मार्ग या दिशा की दिशा निर्धारित करें। मानचित्र पर अंकित पाठ्यक्रम या असर रेखा पर एक रूलर जोड़कर और उसके साथ एक चांदा जोड़कर, चांदा के केंद्रीय स्ट्रोक को मध्याह्न रेखा के साथ संरेखित करते हुए, चांदा के साथ रूलर को निकटतम मध्याह्न रेखा पर लाएं। प्रोट्रैक्टर पर रीडिंग निर्धारित किए जाने वाले कोर्स या बियरिंग का मूल्य (डिग्री और अंशों में) बताएगी। यदि मार्ग या असर दिशा एनई या एनडब्ल्यू क्वार्टर में है, यानी। एन दिशा में, तो ऊपरी रीडिंग प्रोट्रैक्टर पर ली जाती है, लेकिन यदि दिशा एसई या एसडब्ल्यू क्वार्टर में है, यानी। S की दिशा में, तो निचली रीडिंग ली जाती है।
6. समुद्री मानचित्र पर दो बिंदुओं के बीच की दूरी मापें। दो बिंदुओं के बीच की दूरी मापते समय, एक कंपास सुई को एक बिंदु पर और दूसरी को दूसरे बिंदु पर रखें, और इन बिंदुओं के बीच की दूरी को मापें। फिर कम्पास को फ्रेम के किनारे ले जाया जाता है और कम्पास से ली गई दूरी मापी जा रही दूरी के अनुरूप अक्षांश में निर्धारित की जाती है।
यदि बिंदुओं के बीच की दूरी को एक कम्पास समाधान से नहीं मापा जा सकता है, तो इसे भागों में मापा जाता है - प्रत्येक भाग संबंधित अक्षांश में।
7. दिए गए ऑब्जेक्ट से एक निश्चित दूरी पर शुरुआती बिंदु से मानचित्र पर एक कोर्स प्लॉट करें।
इस समस्या को हल करने के लिए, मानचित्र के साइड फ्रेम से, उसके उस हिस्से में मील की एक निश्चित संख्या हटा दें जो दिए गए ऑब्जेक्ट के विपरीत पड़ता है।
किसी दी गई वस्तु के स्थान के अनुरूप एक बिंदु पर मानचित्र पर एक कंपास सुई रखें, और एक चाप का वर्णन करने के लिए एक कंपास पेंसिल का उपयोग करें।
प्रारंभिक बिंदु से, परिवृत्त पर एक स्पर्श रेखा खींचें।
8. एक बिंदु को एक मानचित्र से दूसरे मानचित्र पर ले जाएँ।
इस समस्या को दो तरीकों से हल किया जा सकता है:
· एक मानचित्र से किसी दिए गए बिंदु का अक्षांश और देशांतर लें और उनका उपयोग उस बिंदु को दूसरे मानचित्र पर आलेखित करने के लिए करें;
· एक मानचित्र से दोनों मानचित्रों पर अंकित किसी वस्तु का वास्तविक प्रभाव लें, और, इस वस्तु से किसी दिए गए बिंदु तक की दूरी मापने के बाद, लिए गए वास्तविक प्रभाव को दूसरे मानचित्र पर अंकित करें और वस्तु से मापी गई दूरी को हटा दें बियरिंग लाइन, इसे दूसरे कार्ड के पैमाने पर ले जाना।
पवन लेखा
ग्राफ़िक डेड रेकनिंग (लेइंग) में मानचित्र पर गणना और प्लॉटिंग शामिल होती है, जिसे जहाज की गति को यथासंभव सटीक रूप से प्रतिबिंबित करना चाहिए।
जब कोई हवा या करंट न हो तो स्थिर दिशा में एक सरल बिछाने का कार्य इस प्रकार है (चित्र 1.15)। मानचित्र पर, प्रारंभिक (पिछले अंक या देखे गए) बिंदु एम से, इच्छित पथ की एक रेखा खींचें और एक प्रोट्रैक्टर के साथ संबंधित वास्तविक पाठ्यक्रम आईआर को मापें। इस रेखा के ऊपर (ऐसी स्थितियों में यह पाठ्यक्रम रेखा के साथ मेल खाता है) मुख्य कम्पास के अनुसार पाठ्यक्रम लिखा जाता है, और इसका सुधार कोष्ठक में लिखा जाता है। इस पाठ्यक्रम और सुधार को निकटतम आधे डिग्री तक पूर्णांकित किया जाता है ताकि उनका बीजगणितीय योग आईआर दे सके (चित्र 1.15 में आईआर = 67.5°)।
वांछित गणनीय बिंदु एम सी के लिए लैग रोल रीडिंग में अंतर के आधार पर और प्रारंभिक मो के रूप में लिया गया (चित्र 1.15 रोल = 62.5 में), लैग एस = वी रोल के साथ पोत के नेविगेशन की गणना सूत्रों का उपयोग करके की जाती है। इस यात्रा को पाठ्यक्रम रेखा के साथ मानचित्र पैमाने पर प्लॉट किया जाता है और एक गणनीय स्थान M s प्राप्त किया जाता है। ऐसी जगह को पाठ्यक्रम रेखा के पार एक डैश के साथ चिह्नित किया जाता है और, हमेशा की तरह, जहाज का समय और लॉग गणना अंकित की जाती है। बेशक, वे चित्र में दिखाए गए मानचित्र पर नहीं डालते हैं। 1.15 पदनाम आईआर, एम ओ, एस एल और एम एस।
जहाज हवा और पानी के बीच की सीमा पर स्थित है। जब कोई जहाज चलता है, तो वायुराशियों (हवा) की गति उसे इच्छित मार्ग से भटका देती है और उसकी गति बदल देती है; इसके अलावा, हवा लहर फैलाती है (जिससे जहाज को झटका लगता है) और एक बहाव धारा पैदा होती है।
हवा का नाम क्षितिज पर उस बिंदु से मिलता है जहां से वह बहती है
उदाहरण के लिए, यदि हवा पूर्वोत्तर दिशा से चलती है, तो उसे पूर्वोत्तर कहा जाता है।
यह कहने की प्रथा है: हवा "कम्पास में उड़ती है"ए जहाज़ "कम्पास से चलता है".
हवा की दिशा और जहाज की केंद्र रेखा के बीच के कोण को हवा के सापेक्ष जहाज की दिशा कहा जाता है। यदि हवा स्टारबोर्ड की ओर चलती है, तो वे कहते हैं कि "जहाज स्टारबोर्ड कील पर चल रहा है।" यदि हवा बंदरगाह की ओर चलती है, तो वे कहते हैं कि "जहाज बंदरगाह की ओर चल रहा है।"
जब जहाज के केंद्र तल और पवन रेखा के बीच का कोण 8 अंक से कम होता है, या, उस मामले के लिए, 90° से कम होता है, तो वे कहते हैं कि "जहाज एक करीबी रास्ते पर है", नाम जोड़ते हुए टैक का: "स्टारबोर्ड टैक का खींचा हुआ कोर्स" या "पोर्ट टैक पर क्लोज-हाल्ड कोर्स।"
बाएँ टैक को l/g के रूप में संक्षिप्त किया गया है, और दाएँ टैक को p/g के रूप में संक्षिप्त किया गया है।
नज़दीक से तय किया गया कोर्स कठिन और पूर्ण हो सकता है।
क्लोज़-हेल्ड कोर्स तब होगा जब जहाज की केंद्र रेखा और हवा की दिशा के बीच का कोण 6 अंक से कम हो। यदि यह कोण 6 अंक से अधिक है, तो इस स्थिति में पाठ्यक्रम को पूर्ण समापन कहा जाता है।
जब जहाज के केंद्र तल और पवन रेखा के बीच का कोण 8 बिंदु या 90° होता है, तो जहाज के मार्ग को गैलफ़ाइंड या आधा पवन कहा जाता है (चित्र 1.16.)।
जब जहाज के केंद्र तल और पवन रेखा के बीच का कोण 8 बिंदु से अधिक, लेकिन 16 बिंदु से कम हो, तो हवा के सापेक्ष पाठ्यक्रम को बैकस्टे कहा जाता है (चित्र 1.16)।
जब हवा सीधे विपरीत दिशा में चलती है, तो जहाज के मार्ग को जिब कहा जाता है।
जब हवा सीधे जहाज के धनुष में चलती है, तो वे कहते हैं: "हवा सीधे धनुष के पार चल रही है" या "जहाज हवा के विपरीत जा रहा है" (लेवेंटिक)।
जब जहाज चल रहा होता है, तो पानी की एक धारा उसकी कड़ी के पीछे बनी रहती है, जिसे वेक कहा जाता है। जिब या बायीं ओर जाते समय, जहाज का केंद्रीय तल वेक के साथ मेल खाता है।
अन्य मार्गों पर जहाज हवा में उड़ जाता है; ऐसे बहाव को बहाव कहा जाता है। बहाव के दौरान, व्यास तल वेक जेट के साथ एक कोण बनाता है, जिसे बहाव कोण कहा जाता है (चित्र 1.17.)।
इस प्रकार, बहाव कोण ए जहाज के केंद्र रेखा तल द्वारा उस दिशा के साथ बनाया गया कोण है जिसमें यह वास्तव में हवा की उपस्थिति में चलता है (पथ-बहाव या बहाव पीयू ए के साथ ट्रैक कोण)
निकट की ओर जाते समय नौकायन जहाजों में सबसे अधिक बहाव होता है। इसके विपरीत, यांत्रिक इंजन वाले जहाजों में गैलफ़ाइंड कोर्स के दौरान सबसे अधिक बहाव होता है, अर्थात। जब हवा बोर्ड के लंबवत चलती है।
सामान्य तौर पर, बहाव की भयावहता विभिन्न कारणों पर निर्भर करती है। उदाहरण के लिए, फ्रीबोर्ड जितना बड़ा होगा, जहाज का बहाव उतना ही कम होगा और हवा जितनी तेज़ होगी, जहाज का बहाव उतना ही अधिक होगा।
समान परिस्थितियों में, गहरे ड्राफ्ट वाले जहाज में उथले ड्राफ्ट वाले जहाज की तुलना में कम बहाव होगा।
नौकायन जहाजों पर बहाव की मात्रा 1-2 अंक या उससे भी अधिक तक पहुँच सकती है। बड़े स्ट्रोक के साथ, बहाव छोटे स्ट्रोक की तुलना में कम होगा।
बहाव की मात्रा कम्पास के अज़ीमुथल वृत्त का उपयोग करके निर्धारित की जा सकती है, जिसके लिए दिशा खोजक को वेक स्ट्रीम की दिशा में स्थापित किया जाता है, इस प्रकार अज़ीमुथल वृत्त पर जहाज के केंद्र तल और उसकी रेखा के बीच का कोण प्राप्त होता है। गति, कुछ मामलों में सूत्रों का उपयोग किया जाता है, लेकिन बहाव कोण का सबसे विश्वसनीय माप अवलोकनों के अनुसार प्राप्त किया जाता है।
जैसा कि चित्र की परिभाषाओं से देखा जा सकता है। 1.18, निष्पक्ष
![]() .
.
हालाँकि, मुख्य कार्य इच्छित पथ पर चलना है। ऐसा करने के लिए, बहाव की उपस्थिति के साथ, आपको हवा की दिशा में एक कोण ए द्वारा पाठ्यक्रम को बदलने की आवश्यकता है, जैसा कि वे कहते हैं, "हवा की ओर ले जाएं।" इस मामले में, सूत्र का उपयोग करके हम पाते हैं
![]() .
.
परिणामी सही हेडिंग को कंपास केके = आईआर - डीके में परिवर्तित किया जाता है और हेलसमैन को दिया जाता है या ऑटोपायलट पर सेट किया जाता है।
गणना, बहाव को ध्यान में रखते हुए, ट्रैक लाइन के साथ की जाती है, उस पर नेविगेशन एस एल को स्थगित कर दिया जाता है, सबसे सरल बिछाने में गिने जाने वाले बिंदुओं को नामित और लेबल किया जाता है। किसी भी मील के पत्थर के ऊपर जहाज की स्थिति प्राप्त करने के लिए, इसका असर आईपी ^ = आईआर ±90° ट्रैक लाइन पर निशान लगाकर किया जाता है।
ट्रैक लाइन के ऊपर मानचित्र पर शिलालेख चित्र में दिखाए अनुसार बनाया गया है। 1.18 इस गणना के साथ कि कम्पास पाठ्यक्रम का बीजगणितीय योग, इसका सुधार और बहाव कोण पीयू ए देता है, मानचित्र पर प्लॉट किया गया है।
हवा की लहरें जहाज को रास्ते से भटकने का कारण बनती हैं, खासकर जब लहर का असर जहाज के डीपी के साथ एक न्यून कोण बनाता है; "यॉ कोण ¡" £ 4° तक पहुंच सकता है, और अधिरचना के साथ हवा और पतवार के साथ तरंग की जटिल बातचीत के कारण, चिह्न ¡ कोण a के चिह्न के विपरीत और परिमाण में बड़ा हो सकता है, अर्थात। जहाज हवा की दिशा में नहीं, बल्कि हवा की दिशा में जाएगा: उदाहरण के लिए, a = +2°. ¡ = -3°; कुल प्रभाव (ए + ¡) = -1° (बंदरगाह की हवा के साथ जहाज बाईं ओर चलता है!)।
अंत में, आइए एक ऐसे प्रश्न पर विचार करें जो केवल एक सेलबोट के लिए विशिष्ट है:
यदि एक नौकायन जहाज को "हवा में" लक्ष्य तक पहुंचने की आवश्यकता है, अर्थात। हवा के विपरीत जाने के लिए, टैकिंग का उपयोग करना आवश्यक है, अर्थात। हवा की ओर रुख करें (चित्र 1.19.)।
टर्निंग पॉइंट (कील का परिवर्तन) उस समय स्थित होता है जब वस्तु इष्टतम टैकिंग कोण के दोगुने प्लस ए (इष्टतम टैकिंग कोण = हवा में चलते समय सबसे बड़ी चढ़ाई का कोण) के बराबर गति पर होती है।
वर्तमान के लिए लेखांकन
विभिन्न कारणों से समुद्रों एवं महासागरों में जल की गति आगे की ओर होती है, जिसे धारा कहते हैं।
धारा के दो तत्व हैं: गति और दिशा। धारा की गति जल के कणों द्वारा एक घंटे में तय की गई मील की संख्या है। जब धारा कमज़ोर होती है, तो इसकी गति प्रति दिन मील की संख्या से निर्धारित होती है।
धारा की दिशा वह दिशा मानी जाती है जिसमें एक तैरती हुई वस्तु अकेले धारा के प्रभाव में पर्यवेक्षक से दूर चली जाती है।
आमतौर पर धारा की दिशा वास्तविक बीयरिंगों में इंगित की जाती है और इसका नाम, जहाज के पाठ्यक्रम की तरह, क्षितिज पर उस बिंदु से मिलता है जहां वह जा रहा है। धारा की दिशा के बारे में यह कहने की प्रथा है कि धारा, जहाज की तरह, कम्पास से आती है।
धाराएँ स्थिर, आवधिक (ज्वारीय) और यादृच्छिक हो सकती हैं।
स्थिर धाराएँ वे होती हैं जिनकी दिशा और औसत गति वर्ष-दर-वर्ष लगभग अपरिवर्तित रहती है। धारा की गति बदलती रहती है और प्रतिदिन 10 से 120 मील तक होती है।
ज्वारीय धाराएँ वे हैं जो ज्वार की क्रिया से उत्पन्न होती हैं।
कुछ क्षेत्रों में ज्वारीय धाराएँ महत्वपूर्ण गति तक पहुँच जाती हैं (£15 समुद्री मील)
एक ही दिशा में लंबे समय तक चलने वाली हवाओं के साथ-साथ लंबे समय तक होने वाली बारिश आदि के परिणामस्वरूप यादृच्छिक धाराएं उत्पन्न होती हैं।
मृत गणना के बारे में इस खंड में पहले कही गई हर बात हमें केवल पानी के सापेक्ष जहाज की गति को ध्यान में रखने की अनुमति देती है। जाहिर है, नौवहन सुरक्षा सुनिश्चित करने के लिए वर्तमान को भी ध्यान में रखना आवश्यक है।
वर्तमान वेग वेक्टर V t को मेरिडियन K t और गति V t के सापेक्ष इसकी दिशा की विशेषता है। आइए हम पोत V c की सापेक्ष गति के वेक्टर और इसके निरपेक्ष (किनारों के सापेक्ष) के वेक्टर को निरूपित करें और समुद्र के नीचे) गति, जिसे ट्रैक गति वी पी भी कहा जाता है। नामित गति के अर्थ के अनुसार, हमारे पास निम्नलिखित वेक्टर समानता है:
यदि सापेक्ष गति वी सी और जहाज का मार्ग आईआर = केके + डीके, बहाव कोण ए और वर्तमान वेक्टर वी टी दिया गया है, तो यह पता लगाने के लिए कि जहाज कहां जा रहा है और किस गति से जा रहा है, यह आवश्यक है वेक्टर समानता को हल करें. ऐसा करने के लिए, पहले, जैसा कि पिछले पैराग्राफ में वर्णित है, पीयू ए ढूंढें और वर्तमान को ध्यान में रखे बिना एक पथ रेखा बिछाएं। वेक्टर V c का निर्माण इस रेखा के साथ किया गया है, और वेक्टर V T का निर्माण इसके अंत से किया गया है (चित्र 1.20)। समापन वेक्टर वी पी लॉन्चर के ट्रैक कोण, जमीन की गति देता है, और बहाव कोण बी को भी प्रकट करता है। दायीं ओर बहने पर यह कोण सकारात्मक और बायीं ओर जाने पर नकारात्मक माना जाता है। परिभाषाओं और चित्र से. 1.20 देखें
![]() .
.
ट्रैक कोण पीयू सी पोत की ट्रैक लाइन की दिशा निर्धारित करता है, जिसके ऊपर, पहले की तरह, केके, डीके और कुल बहाव कोण सी = ए + बी अंकित है। गणनीय बिंदुओं को एक ही लाइन पर प्लॉट किया जाता है, लेकिन नेविगेशन एस एल को लाइन पीयू ए के साथ स्थगित कर दिया जाता है, जहां से नॉच को वेक्टर वी टी के समानांतर पथ लाइन पीयू सी में स्थानांतरित किया जाता है (चित्र 1.20 देखें)।
यदि वेक्टर और धारा की क्रिया का आकलन अवलोकनों से किया जाता है, उदाहरण के लिए, सटीक अवलोकनों से, तो बहाव कोण प्राप्त होता है साथसच्चे मार्ग की रेखाओं और जहाज के पथ के बीच
![]() .
.
बहाव कोण c जहाज के केंद्र तल के धनुष और उसकी जमीनी गति V p के वेक्टर के बीच का कोण है। दाईं ओर बहाव को सकारात्मक माना जाता है, और बाईं ओर - नकारात्मक।
व्यवहार में अक्सर, बिछाने की मुख्य समस्या, बहाव और प्रवाह को ध्यान में रखते हुए, आमतौर पर एक अलग फॉर्मूलेशन में हल की जाती है। अर्थात्, दिया गया पथ वह पथ है जिसके साथ जहाज को हवा और धारा की कार्रवाई के बावजूद चलना चाहिए। बहाव कोण ए और वर्तमान वेक्टर वी टी ज्ञात हैं। इस समस्या का ग्राफिकल समाधान निम्नानुसार किया जाता है।
मानचित्र पर, प्रारंभिक मूलांक बिंदु से, दिए गए पथ की एक रेखा खींचें, जो मेरिडियन के सापेक्ष कोण PU बनाती है (चित्र 1.21)। उसी बिंदु से, एक प्रवाह वेक्टर वी टी का निर्माण इसके तत्वों के टी और वी टी का उपयोग करके किया जाता है, और इस वेक्टर के अंत से वी सी के बराबर कंपास समाधान के साथ पथ रेखा पर एक पायदान बनाया जाता है। इससे ज़मीन की गति Vp, लॉन्चर के ट्रैक कोण a और धारा द्वारा बहाव कोण b का पता चलता है (चित्र 1.21 देखें)।
बेशक, गति के एक सदिश त्रिकोण के बजाय, जिसकी भुजाएँ प्रति घंटे मील की संख्या व्यक्त करती हैं, आप समान समय अंतराल t के लिए दूरियों S = Vt का एक समान त्रिकोण बना सकते हैं।
गणनीय बिंदु, हमेशा की तरह, ट्रैक लाइन पर प्लॉट किए जाते हैं, जिसके लिए नेविगेशन एस एल को लाइन पीयू ए के साथ प्लॉट किया जाता है और ट्रैक लाइन पर वेक्टर वी टी के समानांतर ले जाया जाता है।
जहाज कुल (या कुल) धारा से प्रभावित होता है, जिसकी दिशा और गति अक्सर बड़ी त्रुटियों के साथ ज्ञात होती है। यदि आवश्यक हो, तो दिशा के टी और गति वी टी को अवलोकनों का उपयोग करके "नेविगेशन" विधि द्वारा निर्धारित किया जा सकता है: हवा के पर्याप्त सटीक खाते के साथ, के टी विसंगतियों की कई दिशाओं के औसत मूल्य के बराबर है, और वी टी औसत मूल्य है नौकायन के घंटे तक कई विसंगति मूल्यों को कम किया गया।
यात्रा के दौरान, नाविक को विभिन्न घटनाओं के घटित होने के लिए समय और (कभी-कभी) अंतराल के समय की पूर्व-गणना करनी चाहिए: यात्रा, एक मील के पत्थर की सबसे छोटी दूरी, एक प्रकाशस्तंभ की आग का खुलना, एक रिपोर्टिंग बिंदु, आदि। प्रत्येक घटना के लिए, मानचित्र पर एक बिंदु चिह्नित किया जाता है, और समय टी और अंतराल ओएल की उलटी गिनती सूत्रों के अनुसार पाई जाती है (चित्र 1.22):
; ![]()
![]() ; .
; .
चित्र में. 1.22 एस पी और एस एल लाइटहाउस बीम के लिए दिखाए गए हैं, ओआईपी ^ = आईपी ^ ±180°, आईपी ^ =आईआर ±90°।
परिसंचरण लेखांकन
परिसंचरण निरंतर पतवार बिछाने के साथ जहाज के द्रव्यमान के केंद्र की गति का प्रक्षेप पथ है।
बिछाने के समय ध्यान में रखने के लिए, छोटे और मध्यम-टन भार वाले जहाजों के संचलन को त्रिज्या आर सी (सामरिक व्यास का आधा) के साथ एक वृत्त के चाप के रूप में लिया जाता है और 180 डिग्री तक घूमने का समय टी 180 होता है। ये चपलता विशेषताएँ फ़ील्ड अवलोकनों से निर्धारित की जाती हैं, आमतौर पर दो पतवार स्थितियों के साथ: जहाज पर आधा - 15° और जहाज पर - लदे और उतारे गए जहाज के लिए 35°।
यदि मोड़ से पहले और बाद की पाठ्यक्रम रेखाएँ मानचित्र पर निर्दिष्ट हैं, तो परिसंचरण का निर्माण निम्नानुसार किया जाता है (चित्र 1.23)। इन रेखाओं के प्रतिच्छेदन कोण का एक समद्विभाजक MO बनाएं और उस पर एक बिंदु O ढूंढें, जिससे त्रिज्या R c का एक चाप उन पर स्पर्शरेखा है। यह मोड़ का प्रारंभिक बिंदु H और अंतिम बिंदु K निर्धारित करता है।
कोण a (डिग्री में) के माध्यम से घूमने का समय सूत्र का उपयोग करके अनुमानित किया जाता है
![]() .
.
अन्य मामलों में, यदि मोड़ का प्रारंभिक बिंदु एच और दिशा निर्दिष्ट है
नए पाठ्यक्रम की लाइनें, बिछाने के दौरान परिसंचरण को ध्यान में रखते हुए अलग-अलग तरीके से की जाती हैं (चित्र 1.23 देखें)।
बिंदु H से, एक लंबवत HO को पिछले पाठ्यक्रम की रेखा पर पुनर्स्थापित किया जाता है, एक त्रिज्या R c को इसके साथ खींचा जाता है, और इस त्रिज्या के साथ एक चाप परिणामी केंद्र O से खींचा जाता है। फिर, एक प्रोट्रैक्टर और एक समानांतर शासक का उपयोग करके, इस चाप की स्पर्शरेखा एक नई पाठ्यक्रम रेखा खींचें, जो अंतिम बिंदु K निर्धारित करती है।
किसी दिए गए R c और घूर्णन कोण a के लिए समान बिंदु H और K खंड d 1 और d 2 या कोण q और खंड d की गणना और निर्माण द्वारा प्राप्त किए जा सकते हैं।
मध्यवर्ती यात्रा शीर्ष कोण ![]() , मध्यवर्ती फ़्लोट मान
, मध्यवर्ती फ़्लोट मान ![]() .
.
प्रारंभिक बिंदु H पर जहाज के आगमन की समय और लॉग गणना के आधार पर पूर्व-गणना की जानी चाहिए। इस बिंदु पर पहुंचने के लिए स्थलों के सेकेंड बेअरिंग और दूरी को रेखांकित करना और भी महत्वपूर्ण है। नई कोर्स लाइन के दृष्टिकोण को भी पूर्व निर्धारित बीयरिंगों और संदर्भ दूरी का उपयोग करके नियंत्रित किया जाना चाहिए।
एस टी = वी टी. टी ए;
खंड एस टी की दिशा बिंदु एच से प्रवाह के विपरीत दिशा में रखी गई है, बाकी चित्र से स्पष्ट है।
नौकायन करते समय, जहाज दो वातावरणों - हवा और पानी की सीमा पर होता है, जिसकी गति इसे प्रभावित करती है, इसे पाठ्यक्रम से भटकाती है और इसकी गति को बदल देती है।
हवा के द्वारा जहाज की गति को बहाव कहा जाता है। पवन वायुराशियों की आगे की गति है। हवा की दिशा वह दिशा है (डिग्री में) जिससे हवा चल रही है। हवा की गति मीटर प्रति सेकंड या पॉइंट में मापी जाती है।
चित्र .1
मान लीजिए कि जहाज के स्वयं के प्रणोदकों के संचालन के कारण पानी के सापेक्ष जहाज की गति V0 है (चित्र 1)। जहाज की गति के लिए वायु प्रतिरोध को जहाज पर एक पर्यवेक्षक द्वारा वायु के विपरीत प्रवाह के रूप में माना जाता है, जिसका वेग वेक्टर (-V0) है। आइए आप सच्चे वायु गति सदिश बनें। हवा का प्रतिप्रवाह और सच्ची हवा, मिलकर, एक चलते हुए जहाज पर देखे गए कुल प्रवाह का निर्माण करते हैं और इसे स्पष्ट (अवलोकित) हवा कहा जाता है। स्पष्ट हवा की गति वेक्टर ज्यामितीय योग के बराबर है:
डब्ल्यू = यू + (-वी0) = यू - वी0।
स्पष्ट हवा की गति एनीमोमीटर का उपयोग करके या मैन्युअल रूप से एनीमोमीटर का उपयोग करके स्वचालित रूप से निर्धारित की जाती है, किलोवाट दिशा एनीमोमीटर द्वारा या ध्वज या पेनांट की दिशा में निर्धारित की जाती है। स्पष्ट हवा. हेडिंग कोण qW पर जहाज पर कार्य किए बिना, यह जहाज के पाल के केंद्र पर लगाए गए कुल वायुगतिकीय बल P का कारण बनता है। अधिरचना के अपवर्तक गुणों के कारण, सामान्य स्थिति में बल P की क्रिया की दिशा स्पष्ट हवा की दिशा से मेल नहीं खाती है। बल P के प्रभाव में, जहाज बहाव गति VDR के साथ इस बल की दिशा में चलता है।
आइए वेग VDR को केंद्र तल के अनुदिश घटकों VDR X और किरण के अनुदिश VDR Y में विघटित करें। स्पष्ट हवा की दिशा के आधार पर गति VDR X को गति V0 में घटाया या जोड़ा जाता है। यदि अंतराल काम करता है, तो यह इस गति को ध्यान में रखता है। इसीलिए
वीएल = वी0 + वीडीआर एक्स।
गति VDR Y जहाज को दिए गए मार्ग से भटका देती है। ज्यामितीय रूप से जहाज की गति Vl को गति VDR Y के साथ जोड़कर, हम जहाज की वास्तविक, या जमीनी गति का वेक्टर V प्राप्त करते हैं:
वी = वीएल + वीडीआर वाई।
जैसा कि आप देख सकते हैं, वेग Vl और VDR Y जोड़ने पर जहाज उनके परिणामी की दिशा में आगे बढ़ता है।
वह रेखा जिसके अनुदिश जहाज वास्तव में प्रणोदन और स्पष्ट हवा के प्रभाव में समुद्र के तल के सापेक्ष चलता है, बहाव रेखा कहलाती है। जहाज का व्यास तल, ट्रैक के साथ चलते समय, वास्तविक पाठ्यक्रम रेखा के समानांतर रहता है। यह इस तथ्य के कारण है कि कर्णधार लगातार दिए गए सही शीर्षक को बनाए रखता है। नतीजतन, जहाज अपने धनुष के साथ नहीं, बल्कि अपने उभार के साथ ट्रैक पर आगे बढ़ता है।
वास्तविक मध्याह्न रेखा के उत्तरी भाग और बहाव के दौरान ट्रैक लाइन के बीच वास्तविक क्षितिज के तल में बने कोण को पीयू के बहाव के दौरान ट्रैक कोण कहा जाता है।
बहाव के दौरान वास्तविक पथ की रेखाओं और पथ के बीच वास्तविक क्षितिज के तल में बने कोण को बहाव कोण कहा जाता है? यदि हवा जहाज के बाईं ओर चल रही है, तो बहाव कोण सकारात्मक है (बहाव के दौरान हेडिंग कोण वास्तविक हेडिंग से अधिक है)। जब हवा स्टारबोर्ड की ओर से होती है, तो बहाव का कोण नकारात्मक होता है (बहाव के दौरान ट्रैक का कोण वास्तविक दिशा से कम होता है)।
बहाव कोण स्पष्ट हवा की गति और हेडिंग कोण, जहाज की गति और डिजाइन सुविधाओं पर निर्भर करता है: सुपरस्ट्रक्चर की ऊंचाई और वास्तुकला, पतवार की सतह और पतवार आकृति का आकार। बहाव कोण को बहाव मीटर का उपयोग करके मापा जाता है। इस उपकरण की अनुपस्थिति में, विभिन्न नौकायन स्थितियों के लिए बहाव कोणों का चयन प्रायोगिक डेटा से संकलित बहाव तालिका से किया जाता है। चित्र से. 1 दृश्यमान:
सूत्र - बीजीय, कोण? उसके संकेत के साथ आता है.
नौपरिवहन के अभ्यास में जहाज के बहाव से संबंधित मुख्य रूप से दो समस्याओं का समाधान करना होता है। सीधा कार्य:
लॉन्चर के खिसकने पर ट्रैक कोण की गणना करें? (बहते समय जहाज के पथ की रेखा), यदि सही मार्ग निर्दिष्ट किया गया है।
इस समस्या को हल करने के लिए आपको चाहिए:
— बहाव कोण का चिह्न निर्धारित करें?;
- स्पष्ट हवा के शीर्ष कोण qW की गणना करें;
— कोण का आकार चुनें? तर्कों द्वारा बहाव तालिका से: जहाज की गति और qW द्वारा;
- जब लांचर बह रहा हो तो ट्रैक कोण की गणना करें?, मानचित्र पर एक ट्रैक रेखा खींचें।
सीसी = 79.0°; वीएल = 12.0 समुद्री मील;
?जीके = + 1.0°; हवा 5° -12 मी/से.
समाधान:
हवा जहाज के बाईं ओर चल रही है - कोण? सकारात्मक:
आईआर = सीसी + ?जीसी = 80.0°;
? = +4.0°; पु? = आईआर + ? = 84.0°.
2. यदि रेडियो बीकन मानचित्र फ़्रेम की पूर्वी या पश्चिमी सीमाओं के बाहर स्थित है तो वास्तविक रेडियो बीयरिंग बिछाना।
परिभाषित बिंदु (बिंदु एम') की स्थिति जानने के लिए जिसके माध्यम से केआरएमके (बिंदु ए) पर रेडियो असर किया जाएगा, यह आवश्यक है:
1) ? "RTSNO" से KRMKA (?A, ?A) के निर्देशांक लिखें;
2) ? मूल्य की गणना करें? ? = ?P – ?A, कहाँ?P मानचित्र के पार्श्व फ़्रेम का देशांतर है;
3) ? मानचित्र पर KRMKA के समानांतर एक रेखा बनाएं (?A– “RTSNO” से) और खंड को आलेखित करें;
4) ? बिंदु A" के माध्यम से अतिरिक्त मध्याह्न रेखा AA खींचिए;
5) ? बिंदु A' से लॉक करें। पी केआरएमकेए ए से चौराहे तक आ - टी. एम;
6) ? बिंदु M से aa के अनुदिश, एक खंड अलग रखें और, परिणामी बिंदु M' के माध्यम से, KRMK A पर एक रेडियो बेयरिंग लगाएं? यह वांछित स्थिति रेखा (I-I) होगी।
किनारे की वस्तुओं या आकाशीय पिंडों द्वारा जहाज का स्थान निर्धारित करके उसकी स्थिति की जांच किए बिना बिछाने का काम किया जाता है, बुलाया मृत गणना .
ग्राफ़िकल निर्माण विधि का उपयोग करके मानचित्र पर किए गए कैलकुलस को कहा जाता है ग्राफ़िक जहाज़ के पथ की मृत गणना।
विशेष सूत्रों का उपयोग करके गणनाएँ की गईं - लिखा हुआ(विश्लेषणात्मक).
चित्रमय संकेतन. इस विधि का सार इस प्रकार है.
प्रारंभिक बिंदु का निर्धारण करने के समय जहाज की घड़ी पर समय (1 मिनट तक) और लॉग काउंटर की रीडिंग (0.1 मील तक) नोट करें। प्रारंभिक बिंदु ए" पर गोला बनाया गया है और एक शिलालेख के रूप में लिखा गया है। एक भिन्न का उसके पास खाली स्थान में बनाया जाता है: अंश - समय, हर - अंतराल रीडिंग 18.00/2.5 यदि देखा गया बिंदु ए" प्रारंभिक बिंदु ए के पर्याप्त करीब है, तो बिंदु ए से" एक पहली कोर्स लाइन रखी गई है रेखा AC के समानांतर एक सीधी रेखा का रूप। इसके बाद मानचित्र से एसी लाइन मिटा दी जाती है और नई खींची गई लाइन पर कंपास कोर्स की डिग्री की संख्या लिखी जाती है और उसके आगे कोष्ठक में इस कोर्स के लिए सामान्य कंपास सुधार एके की गणना की जाती है, ताकि आप कर सकें। हमेशा यह निर्धारित करें कि आप कौन सा पाठ्यक्रम अपना रहे हैं।
ग्राफिक प्लॉट बनाए रखने से नाविक को नौवहन संबंधी खतरों के संबंध में जहाज की स्थिति का स्पष्ट अंदाजा हो सकता है।
ऑपरेटिंग प्रोपल्सर वाला एक जहाज, हवा और करंट की अनुपस्थिति में, आईआर लाइन के साथ चलता है, और हवा से प्रभावित एक जहाज पीयू α लाइन के साथ चलता है।
यदि कोई गतिशील जहाज हवा और धारा दोनों से एक साथ प्रभावित होता है, तो वह पु एस रेखा के साथ चलता है।
![]() हवा और धारा के एक साथ प्रभाव के तहत जहाज की गति की दिशा लॉन्चर के कोण से निर्धारित होती है
हवा और धारा के एक साथ प्रभाव के तहत जहाज की गति की दिशा लॉन्चर के कोण से निर्धारित होती है
सीधी समस्या: बहाव और प्रवाह पर एक साथ विचार
-जीके दिया गया है और आपको पीयू ढूंढने की जरूरत है
1. मानचित्र पर हम एक रेखा खींचते हैं IR (3cm) IR=GKK+∆GK
2. सबसे पहले हम हवा को ध्यान में रखते हैं α=7˚ IR=300˚ (इसका मतलब है कि हवा बाईं ओर चलती है, जिसका मतलब है α=-7)
3. हम Puα=IR+(-α)=293˚ पर विचार करते हैं (प्रारंभिक बिंदु से हम रेखा Puα खींचते हैं)
4. आपको ∆ गति बनाने की आवश्यकता है; इसके लिए आपको सबसे पहले सापेक्ष गति ज्ञात करनी होगी। हमारे पास Vlag.(11 नॉट) और ∆lag.=+9% (1.09); V0=Vlag.*गुणांक एल
V0= 11*1.09=12 समुद्री मील
संयुक्त लेखांकन करते समय, हम PUα पर कार्य करते हैं
अब हम इन 12 नोड्स को PUα पर रखते हैं और इस वेक्टर के अंत से हम Vcurrent डालते हैं। (स्थिति 3.5 नॉट, 155˚ से)
5. प्रारंभिक बिंदु से, वर्तमान वेक्टर (लंबे) के अंत तक रेखा पुस खींचें और इस रेखा की डिग्री मापें (284˚)
6. कुल बहाव ज्ञात कीजिए (c) β=Pus-Puα=-9˚ c=α+β=-16˚कुल। तोड़फोड़.
7. अपने शुरुआती बिंदु से हम एक बियरिंग लगाते हैं, हमारे पास GKP = 263˚ है, इसे वास्तविक IP = GKP + ∆GK = 262˚ में बदलें (हम इस बियरिंग को लागू करते हैं)
8. इस बियरिंग पर हम 14.3 मील (स्थिति से टावर तक) पर एक पायदान बनाते हैं और इस बिंदु (टॉवर) से हम एक लेन बनाते हैं। पीयू तक
9. पुस पर बिंदु (जहां लेन खींची गई थी) से, धारा के समानांतर, हम पुए तक एक रेखा खींचते हैं और अब हम पुए पर जहाज द्वारा तय की गई दूरी जानते हैं। एस=15 (मान लीजिए)
10. हम ROL रोल = गिनते हैं ; अब हम ol2 (उर्फ ol ट्रैवर्स) OL2 = OL1 + ROL की तलाश कर रहे हैं।



